This robot catches jellyfish with a gentle ‘hug’
Silicone fingers swell with water to trap jellyfish without squishing them
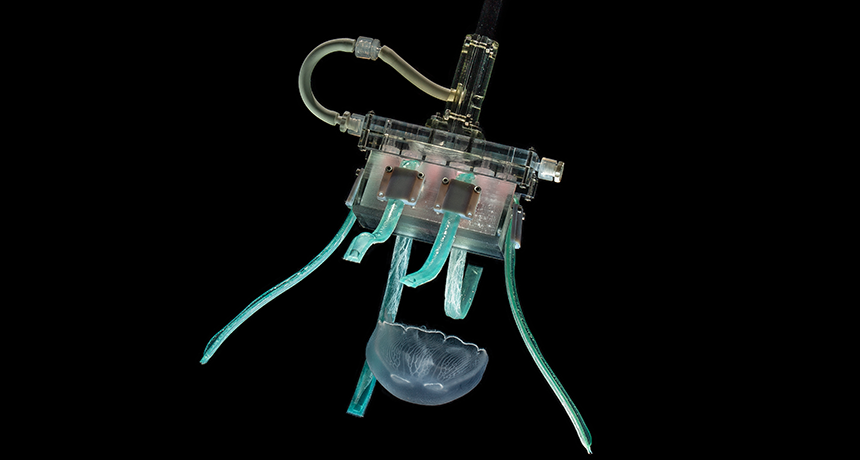
The fingers of this robotic hand reach out to catch a delicate jellyfish.
Anand Varma
Jellyfish seem made for their watery world. These gelatinous creatures, with tentacles that dangle from umbrella-shaped bodies, are 95 percent water. But their fragile bodies have made it hard for scientists to safely catch them for study. Until now. A new soft robot that mimics a human hand can gently catch and clasp jellyfish without harm.
“Jellyfish and other gelatinous animals … have a huge amount of potential to teach us things,” notes Nina Sinatra. She and her colleagues designed and built their new robot to make it easier to study those jellies. Sinatra is a mechanical engineer. That’s someone who uses physics and materials science to design gadgets with moving parts. She worked on the project while at Harvard University in Cambridge, Mass.
Her team described its new device August 28 in Science Robotics. Resembling a robotic hand, its six soft fingers can cradle a flopsy and fragile jellyfish.
“If we aren’t able to safely hold and handle these animals without damaging them,” says Hannah Stuart, “then it makes it really hard to study them.” Stuart is a mechanical engineer at the University of California, Berkeley, who did not take part making the robot. The new robot’s fingers are so soft and flexible that they might not be able to hold themselves up when outside of the water, she notes. But, she adds, the dangly strips work well when they are submerged.
The fingers clip onto a 3-D printed “palm.” It looks like a rectangular box. The scientists made the fingers out of layers of soft and rubbery silicone. One surface has a stiffer layer embedded with tiny nanofibers. The scientists made this layer tougher and less bendy.
Inside each finger is a channel through which water can flow. When directed to grab a jelly, the robot uses a pump to fill the channel with water from around the robot. This makes the fingers curl toward the stiffer side and close in around the jelly.
At first, the scientists designed the hand with four fingers, two each on opposite sides of the palm. But jellyfish easily wriggled out. “As we were trying to go in and give them a little soft hug, they would just exit stage left,” Sinatra quips. The scientists solved the problem by adding a finger to the top and bottom of the palm.
“[The fingers] have a gentle grasping force,” Stuart says. “It’s really the first time that somebody has demonstrated this [approach to handling such soft objects].” The amount of force the fingers exert is less than one newton. Stuart likens that force to the weight of an apple in someone’s hand. But to see if the robot can help biologists study jellies in the ocean, the team should test it in the field, she says. That might require attaching the hand to a deep sea submersible. The new robot should survive that. Its materials can withstand the pressure of the deep sea. Sea water won’t corrode them either.
This project aims to help scientists safely gather information on soft critters, Sinatra says. Her team is also thinking up ways to modify the hand so that it collects other information below the waves. The robot might someday include sensors, samplers that can grab a bit of DNA or cameras that take photos. Getting data on the creatures’ features in the ocean might mean scientists won’t even need retrieve the animal to study it.
The robotic hand also demonstrates how robots can take on all sorts of shapes and sizes, Sinatra says. “[A robot] doesn’t necessarily have to be C-3PO from Star Wars or a big assembly-line robot in a car-manufacturing plant,” she says. “Robots can be made of squishy things. They can be made of foam. They can be kind of whatever you imagine them to be.”