A trail of cosmic dust may lead to alien life
A vast, salty ocean lies hidden deep within a frozen moon of Saturn
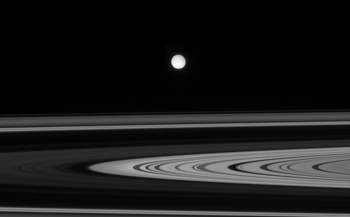
Cassini has spent 12 years exploring Saturn, its moons and its rings of icy dust.
NASA/JPL-Caltech
Outer space may look like an empty void. But that is not completely true.
The vast space between the planets, moons and stars hold trillions of specks of dust. These grains are few and far between. And they are too small to see with the naked eye. But they are fast. They shoot through space as quickly as 400 kilometers (250 miles) per second. That’s hundreds of times faster than a bullet. Importantly, they hold lots of information about places far, far away.
That’s why Sascha Kempf grew excited when a NASA space probe named Cassini ran into clouds of dust as it sped toward Saturn in 2004. Kempf is a planetary scientist at the University of Colorado in Boulder. He worked on the Cassini mission.
Cassini blasted off from Florida in 1997. By February 2004, it had traveled through more than two billion kilometers (1.2 billion miles) of space. At that point, it began to radio back clues of something strange. Cassini detected the chemical signature of a mineral common on Earth — silicate — in the distant space dust. Silicate is the stuff from which beach sand is made.
“That’s really weird,” thought Kempf, as he looked at the data arriving back home. He knew Saturn and everything around it was rich in water. “All the moons we are aware of are ice moons. Saturn’s rings are ice rings,” he points out. And yet Cassini was picking up little pieces of rock. He felt both excited and worried.
Other scientists asked if his discovery was too strange to be true. Maybe Cassini’s dust detector was malfunctioning. Maybe it had gotten contaminated with Earth dust before it blasted off. “I never really felt comfortable,” Kempf says, “because it didn’t make sense.”
Years later, he is finally breathing a sigh of relief. Those whiffs of mineral dust no longer look like a grand scientific mistake. Instead, they have revealed a major discovery. Locked deep inside one of Saturn’s frigid moons, Enceladus, is a warm place where alien life might thrive.
Old trash
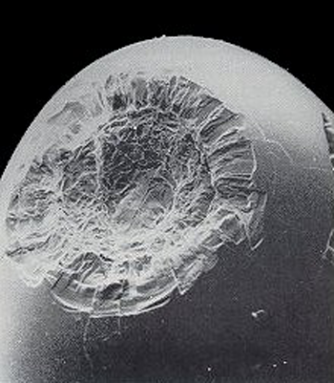
Scientists have known for more than 50 years that outer space is filled with flying dust. Apollo 11 astronauts brought back rocks from the moon’s surface in 1969. Those rocks were dotted with tiny pits and craters. Each of those holes had formed when a grain of cosmic dust smacked into the surface of the moon. They hit so hard they melted a bit of the rock into glass.
Some of this stray dust is likely older than Earth. It is leftover debris from the stuff that clumped together more than four billion years ago to form Earth and the other planets. Other dust comes from newer sources. Meteors kicked it into space when they smacked into planets or moons.
Engineers designed Cassini so it could survive running into odd bits of fast-moving dust. They also fitted it with equipment to count the dust grains and analyze what they were made of.
As Cassini approached Saturn in early 2004, the spacecraft was only capturing one or two bits of dust per week. Most people would consider this boring. But not Kempf’s team. They specialize in studying cosmic dust. And they celebrated every time Cassini caught another mote of it. “Our colleagues made fun of us,” Kempf admits.
Until, that is, things got interesting.
In mid-March 2004, Cassini passed through a cloud of dust so thick that it detected a grain every couple of minutes. The dust detector then went quiet after several days. Two weeks later, another patch of dust clouded its path. More clouds followed.
It was unusual dust. Its recipe included silicate minerals like those found on Earth.
The clouds of mineral dust grew thicker as Cassini approached Saturn. Kempf and his team were eager to find out where this dust could be coming from. Saturn offered plenty of possibilities.
A snow-covered moon
As planets go, Saturn is a veritable cosmic pinball machine. At least 50 little moons whiz around it. Some even careen through the narrow gaps between the planet’s rings. Once Cassini arrived at Saturn in late 2004, flight controllers at NASA began to steer it past one moon after another to get some closer looks.
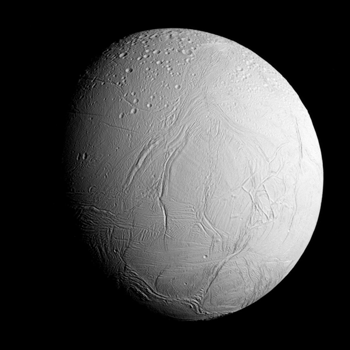
A flyby on July 14, 2005, took Cassini past Saturn’s sixth-largest moon, Enceladus (En-SEL-uh-dus). This little marble of a world is barely 500 kilometers (310 miles) across. That makes it small enough to fit within the borders of Texas. It’s a moon that had already captured scientists’ interest.
Early on, they “realized that something is odd about Enceladus,” notes Kempf. Parts of its surface were covered in craters — as if nothing had changed for billions of years. Other regions had almost no craters. At those sites, something had reshaped the surface and erased old craters.
Enceladus also was known to be the brightest, whitest object in the solar system. Imagine the glare that you see on a snow-covered meadow on a bright afternoon. Cover your face, and you still see it burnt into your eyes. The glare off of Enceladus comes from the reflection of sunlight off of its snow.
This is weird because the moon has almost no atmosphere. It has, in fact, no real weather. It certainly lacks the clouds from which snow falls on Earth. But somehow, a steady sprinkle of snow is always raining down on this moon.
Tiger stripes
Traveling 29,500 kilometers (18,300 miles) per hour, Cassini streaked by within 168 kilometers (104 miles) of the moon’s surface. It captured the first-ever close-up photos of the moon’s south pole. And those pictures turned up a surprise.
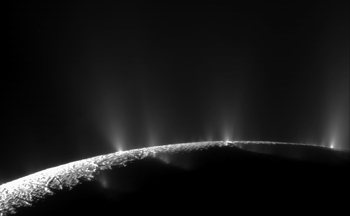
Cassini’s cameras revealed a rugged landscape unlike the rest of Enceladus. The area around its south pole was squished, faulted and buckled into ridges and valleys. Ice boulders larger than houses were strewn about. And four massive cracks sliced across the area. Each crack was straight and deep, like the cuts from a tiger’s claw — and 130 kilometers (around 80 miles) long. A thin mist of ice crystals and water vapor sprayed out from these cracks. They resembled geysers on Earth.
Cassini’s dust detector scooped up thousands of those ice crystals. They contained water ice, like the snow falling on Earth. Many also held sodium chloride — the main ingredient of sea salt.
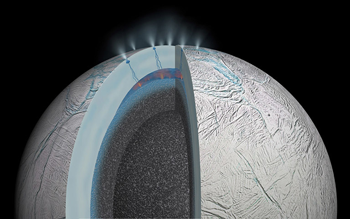
This confirmed what scientists had speculated. The surface of Enceladus is –200° Celsius (about –330° Fahrenheit). That’s almost cold enough to cause air on Earth to turn liquid. But the moon was warm enough on its inside to hold a vast, salty ocean buried under 40 kilometers (25 miles) of ice.
“We don’t really understand how that ocean has survived,” says Francis Nimmo. “We would have expected [it] to have frozen after a few million years.” Instead, that ocean has probably been around since the moon first formed, four billion years ago.
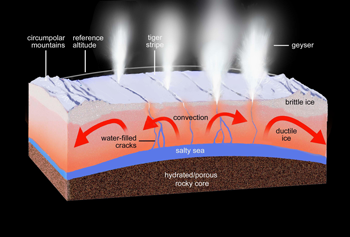
Nimmo is a planetary scientist at the University of California, Santa Cruz. He studies the insides of moons. Enceladus gets squeezed and stretched by gravity as it orbits Saturn, he suspects. “Some of that squeezing and stretching gets converted into heat,” he says. Such heat might keep the ocean from freezing.
Most of the ice spraying out of Enceladus falls back onto it. This explains its constant coating in fresh, white snow. Some of the snow also settles onto four nearby moons: Mimas, Tethys, Dione and Rhea. This gives them a faint, reflective sheen.
Some ice crystals from Enceladus even become part of Saturn’s icy outer, E-ring. The moon’s icy eruptions likely created this, the largest of the planet’s rings. It forms a circle two million kilometers around.
Once ice crystals join the E-ring, radiation emitted by Saturn gradually eat away the crystals. Each bit of ice likely persists in the ring for 100 to 200 years. That implies the E-ring survives only because Enceladus constantly belches more ice into it. All told, this little moon may feed the E-ring 45 million kilograms (50,000 tons) of ice per year. Melt that ice into water, and it would fill 18 Olympic-sized swimming pools.
Journey of dust
Kempf looked at the makeup of ice crystals that Cassini sampled from Enceladus and the E-ring. Ice from both places had bits of silicate dust within it. This was the same stuff Cassini had encountered 50 million kilometers (31 million miles) out from Saturn.
Those silicate grains must come from the ocean deep inside Enceladus, Kempf realized. The moon expels them wrapped inside crystals of ice. Once they enter the E-ring, the ice is cooked away by Saturn’s radiation. This leaves behind only the dust. Being bombarded by radiation, those dust grains develop an electric charge. Saturn’s strong electric field eventually hurls this dust far into space — where Cassini had first run into it.

It might have been tempting to forget about the dust at that point and move on to something else. But planetary scientists like Kempf are different from many others. A geologist studying something on Earth can usually go out and collect more rocks without much trouble. But studying a faraway moon, Kempf can’t do that. He must make do with what few data are available. So Kempf wondered, what might these tiny silicate grains tell him about the interior of Enceladus?
The dust specks that Cassini had tasted were long gone. They had vaporized the instant they smacked into the spacecraft’s detector. But the researchers had information about the dust’s chemical recipe. Over several years, Kempf and two colleagues looked at data from more than 10,000 of those specks.
They gradually realized that the dust grains from Enceladus were unusual in several major ways.
Unlike most rocks on Earth, they contained almost no traces of common mineral-forming metals such as calcium, magnesium and iron. They also were all about the same size — roughly one thousandth as wide as a red blood cell. The dust flung into space when meteors hit moons or planets usually spans a wide range of sizes. So the uniform size of those leaving Enceladus “indicated a very peculiar origin of those particles,” notes Sean Hsu.
At the time, Hsu was working on his PhD under Kempf at the University of Colorado in Boulder (where he still works today). He spent months poring over old studies to see how these tiny, pure-silicate particles form on Earth. High temperature proved key. They grow in hydrothermal vents on the seafloor. These vents spew hot water from deep inside the Earth. Kempf and Hsu reported this in March 2015.
Like Earth, Enceladus must have hydrothermal vents bubbling on its seafloor, they concluded.
A team of scientists in Japan followed up with some convincing laboratory experiments. Working with sealed bags containing water and minerals, they ran mini versions of the chemical reactions that happen in hydrothermal vents. These showed that deep inside Enceladus, where the silicate grains are made, the water must be at least 50 °C (122 °F), as hot as a scalding hot tub. But it might even be boiling hot — 100 °C.
“No one would have expected that this is the explanation back in 2005,” says Kempf. He had assumed that the interior of Enceladus was barely warm enough to keep its ocean unfrozen. And many people had believed it was only a small ocean, limited to the moon’s south pole area. But in September 2015, NASA released Cassini data showing evidence of a much larger, global ocean of water beneath the frozen crust of this moon.
Nor is this necessarily the only Saturnian moon to host a subsurface sea. On October 7, Cassini data provided that Dione, too, might hide an ocean beneath its icy crust. In fact, at least half a dozen objects in our outer solar system are now believed to hold oceans beneath frozen shells. This includes Jupiter’s moons Europa and Ganymede, Neptune’s moon Triton, and even the dwarf planet Pluto.
“Life is full of surprises,” says Kempf.
Lost Atlantis
If there really are warm places inside Enceladus, then it raises the chance that this moon might host life. After all, living things don’t just need water; they also need food — energy. And hydrothermal vents can supply lots of food. Deborah Kelley saw this first-hand in 2000. She’s an oceanographer at the University of Washington in Seattle. And during an expedition in the Atlantic Ocean, her team discovered a new type of seafloor vent.
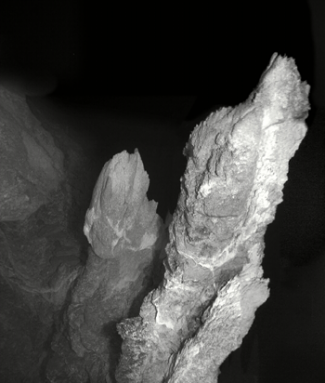
The Lost City Hydrothermal Field is named after the mythical sunken city of Atlantis. It sits atop an undersea mountain named the Atlantis Massif. Its cluster of vents looks like the skyline of a medieval city. Hot water there bubbles out of chimneys. Their pointed stone spires resemble those of a castle. Some tower up to 60 meters (200 feet) above the seafloor.
Thick, fuzzy blobs of microbes decorate the chimneys. Living in the nooks and crannies of their walls are worms, snails, clams and little shrimpy amphipods. Prowling around for food are eels, wreckfish with spiny fins and crabs with spidery legs.

Kelley found that two gases, hydrogen and methane, trickle from the vents. Both make excellent food for microbes. This is why these vents are such hotspots for life. The chemical reactions that produce these gases deep inside Earth are known by the term serpentinization (SUR-pen-teen-ih-ZAY-shun). Scientists believe that the same reaction occurs below the seafloor of Enceladus.
These gases could easily feed living things inside that ice-covered moon, says John Priscu. He is a microbiologist at Montana State University in Bozeman. He has studied single-celled microbes in some of the harshest places on Earth. Those sites include Antarctica’s ice.
“These oceans in the outer solar system should have life,” he says. “If it wasn’t there, I would be very surprised.” Such life may amount to no more than microbes. After all, they require very little energy. “But if there are geothermal vents, there could even be multicellular organisms,” Priscu says. By that he means bigger organisms, like the worms and shellfish seen at Lost City.
Looking for life
Last fall, on October 28, Cassini pulled off one of its most impressive acrobatic stunts. It screamed by within just 50 kilometers (31 miles) of Enceladus’ icy surface. It pierced the cloud of water, dust and sea salt spraying from the cracks at its south pole.
“Within 20 seconds the spacecraft is in and out of the plume,” says Kempf. And within each second it had measured up to 3,500 of those ice crystals.
Kempf was still combing through these results in May 2016. They showed that the moon’s cracks spew some 2.5 kilograms (5.5 pounds) of ice and mineral dust every second.
It confirmed just what he had predicted. “That doesn’t happen very often in planetary science,” he says. It makes him more confident than ever that he hasn’t made some horrible error. It really seems likely that the mineral dust is coming from an ocean deep within Enceladus.
Other evidence also emerged from that flyby. Mission scientists now believe they see traces of hydrogen in the water spraying from Enceladus. Methane, too, has been showing up. This all bolsters the idea that Enceladus offers plenty of food to support life.
Looking for such life inside Enceladus will require sending another spacecraft there. German scientists are designing a crew-less craft to do just that. But it could take nearly 20 years for it to reach Enceladus and land on it.
In the meantime, Cassini’s time studying Enceladus and the other moons of Saturn is drawing to an end. The spacecraft is running out of fuel, so NASA will soon end its mission.
In mid-December of this year, NASA will send Cassini for one last pass by Enceladus. During that event, the probe will measure how much heat is seeping through the ice cracks and into space.
Then, in 2017, mission controllers will use Cassini’s remaining fuel to fire its engines. The spacecraft will spiral closer and closer to Saturn. Cassini will see Saturn’s innermost rings more closely than ever before. It may even see individual chunks of ice that make up those rings.
Then Cassini will skim over Saturn’s misty surface and enter its uppermost clouds. It will slow down as it plows through those thickening clouds. The spacecraft will succumb to Saturn’s gravity. Around September 15, 2017, the probe will plummet. And as it does, it eventually will crumple like tinfoil under the weight — many tons per square inch — of Saturn’s thick atmosphere.
Kempf knew Cassini’s awesome sightseeing venture would eventually come to an end. But he hopes it will yield one last burst of discoveries in its final hours. “This will be awesome,” he predicts. “We will end with fireworks.”